
Robotics and drones used in SNCF’s biggest maintenance workshop
Atelier 57 in Hellemmes is the largest maintenance workshop of the French rail operator SNCF. The building in northern France is no less than 28,000 square metres in…
Atelier 57 in Hellemmes is the largest maintenance workshop of the French rail operator SNCF. The building in northern France is no less than 28,000 square metres in…

Russia will start test runs with a fully automated passenger train in the middle of 2023. This Lastochka train is currently being built by train manufacturers Siemens and…

Smart trams are now running through the city of Florence in Italy, as part of the innovative computing infrastructure developed by the EU-funded project ELASTIC. A set of…
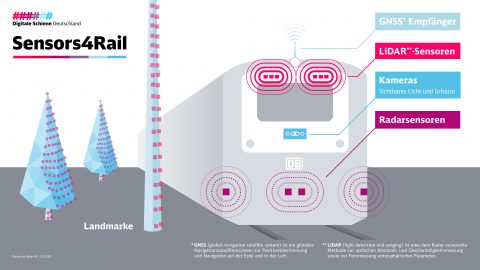
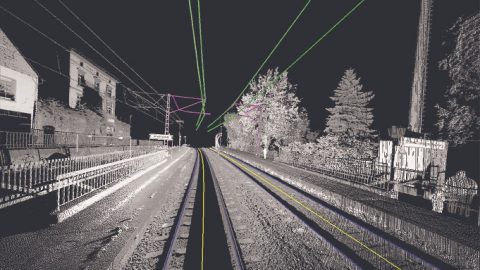
Deutsche Bahn invests 15 million euros in an innovative smart sensor technology to increase the punctuality of the rail operation. The sensors will be tested on Hamburg S-Bahn…

British railway infrastructure manager Network Rail has released the 3D footage of the Ribblehead viaduct that has been mapped out with laser scanners and drones to help with…
Network Rail is looking for a more accurate and efficient way to measure Britain’s network. Swedish engineering company Hexagon will support this intention with its solutions that use…

Russia-based manufacturer Ural Locomotives, a joint venture of Siemens Mobility and Sinara Group, has equipped 51 Lastochka electric trains with computer vision. This move is necessary for introducing…

“Instead of looking at complex technical issues, we should start with the more basic challenges of Automatic Train Operation (ATO), like the emergency parking brakes,” says Richard Plokhaar,…

Russian manufacturer Transmashholding has unveiled a new concept of a two-axle hybrid shunting locomotive. It was developed to run on both diesel fuel and energy of the lithium-ion…

Siemens Mobility and ViP Verkehrsbetrieb Potsdam GmbH will be presenting their research project on the world’s first autonomous tram at InnoTrans 2018. Siemens will be demonstrating a test…